
Wind turbines are classified according to the interaction of the blades with the wind, orientation of the rotor axis with respect to the ground and to the tower (upwind, downwind), and innovative or unusual types of machines. The interaction of the blades with the wind is by drag or lift or a combination of the two.
This means more material and problems with the force of the wind on the rotor at high wind speeds, even if the rotor is not turning. An advantage of the Savonius wind turbine is the ease of construction.


Using lift, the blades can move faster than the wind and are more efficient in terms of aerodynamics and use of material, a ratio of around 100 to 1 compared to a drag device. The tip speed ratio is the speed of the tip of the blade divided by the wind speed, and lift devices typically have tip speed ratios around seven. There have even been one-bladed wind turbines, which save on material; however, most modern wind turbines have two or three blades.

The power coefficient is the power out or power produced by the wind turbine divided by the power in the wind. From conservation of energy and momentum, the maximum theoretical efficiency of a rotor is 59%. The capacity factor is the average power divided by the rated power. The average power is generally calculated by knowing the energy production divided by the hours in that time period (usually a year or can be calculated for a month or a quarter). For example, if the annual energy production is 4500 MWh for a wind turbine rated at 1.5 MW, then the average power = energy/hours = 4500/8760 = 0.5 MW and the capacity factor would be 0.5 MW/1.5 MW = 0.33 = 33%. So the capacity factor is like an average efficiency. A power curve shows the power produced as a function of wind speed (Figure 1.7).
Because there is a large scatter in the measured power versus wind speed, the method of bins (usually 1 m/s bid width suffices) is used.

Wind turbines are further classified by the orientation of the rotor axis with respect to the ground: horizontal axis wind turbine (HAWT) and vertical axis wind turbine (VAWT). The rotors on HAWTs need to be kept perpendicular to the wind, and yaw is this rotation of the unit about the tower axis. For upwind units yaw is by a tail for small wind turbines—a motor on large wind turbines, and for downwind units—yaw may be by coning (passive yaw) or a motor.
VAWT have the advantage of accepting the wind from any direction. Two examples of VAWTs are the Darrieus and giromill. The Darrieus shape is similar to the curve of a moving jump rope; however, the Darrieus is not self-starting, as the blades should be moving faster than the wind to generate power. The giromill can have articulated blades which change angle so it can be self-starting. Another advantage of VAWTs is that the speed increaser and generator can be at ground level. A disadvantage is that taller towers are a problem for VAWTs, especially for wind farm size units. Today there are no commercial, large-scale VAWTs for wind farms, although there are a number of development projects and new companies for small VAWTs. Some companies claim they can scale to MW size for wind farms.
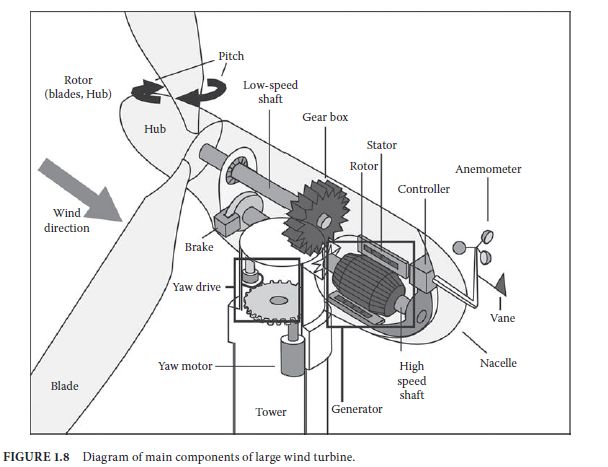
The total system consists of the wind turbine and the load, which is also called a wind energy conversion system (WECS). A typical large wind turbine consists of the rotor (blades and hub), speed increaser (gear box), conversion system, controls and the tower (Figure 1.8). The most common configuration for large wind turbines is three blades, full span pitch control (motors in hub), upwind with yaw motor, speed increaser (gear box), and doubly fed induction generator (allows wider range of rpm for better aerodynamic efficiency). The nacelle is the covering or enclosure of the speed increaser and generator.
The output of the wind turbine, rotational kinetic energy, can be converted to mechanical, electrical, or thermal energy. Generally it is electrical energy. The generators can be synchronous or induction connected directly to the grid, or a variable frequency alternator (permanent magnet alternator) or direct current generator connected indirectly to the grid through an inverter. Most small wind turbines are direct drive and no speed increaser and operate at variable rpm. Wind turbines without a gearbox are direct drive units. Enercon has built large wind turbines with huge generators and no speed increaser, which have higher aerodynamic efficiency due to variable rpm operation of the rotor.
However, there are some energy losses in the conversion of variable frequency to the constant frequency (50 or 60 Hz) needed for the utility grid.
For a drag device, the wind pushes against the blade or sail forcing the rotor to turn on its axis, and drag devices are inherently limited in efficiency since the speed of the device or blades cannot be greater than the wind speed. The maximum theoretical efficiency is 15%. Another major problem is that drag devices have a lot of material in the blades. Although a number of different drag devices (Figure 1.4) have been built, there are essentially no commercial (economically viable) drag devices in production for the generation of electricity.
Most lift devices use airfoils for blades (Figure 1.5), similar to propellers or airplane wings; however, other concepts are Magnus (rotating cylinders) and Savonius wind turbines (Figure 1.6). A Savonius rotor is not strictly a drag device, but it has the same characteristic of large blade area to intercept area.This means more material and problems with the force of the wind on the rotor at high wind speeds, even if the rotor is not turning. An advantage of the Savonius wind turbine is the ease of construction.
Using lift, the blades can move faster than the wind and are more efficient in terms of aerodynamics and use of material, a ratio of around 100 to 1 compared to a drag device. The tip speed ratio is the speed of the tip of the blade divided by the wind speed, and lift devices typically have tip speed ratios around seven. There have even been one-bladed wind turbines, which save on material; however, most modern wind turbines have two or three blades.
The power coefficient is the power out or power produced by the wind turbine divided by the power in the wind. From conservation of energy and momentum, the maximum theoretical efficiency of a rotor is 59%. The capacity factor is the average power divided by the rated power. The average power is generally calculated by knowing the energy production divided by the hours in that time period (usually a year or can be calculated for a month or a quarter). For example, if the annual energy production is 4500 MWh for a wind turbine rated at 1.5 MW, then the average power = energy/hours = 4500/8760 = 0.5 MW and the capacity factor would be 0.5 MW/1.5 MW = 0.33 = 33%. So the capacity factor is like an average efficiency. A power curve shows the power produced as a function of wind speed (Figure 1.7).
Because there is a large scatter in the measured power versus wind speed, the method of bins (usually 1 m/s bid width suffices) is used.
Wind turbines are further classified by the orientation of the rotor axis with respect to the ground: horizontal axis wind turbine (HAWT) and vertical axis wind turbine (VAWT). The rotors on HAWTs need to be kept perpendicular to the wind, and yaw is this rotation of the unit about the tower axis. For upwind units yaw is by a tail for small wind turbines—a motor on large wind turbines, and for downwind units—yaw may be by coning (passive yaw) or a motor.
VAWT have the advantage of accepting the wind from any direction. Two examples of VAWTs are the Darrieus and giromill. The Darrieus shape is similar to the curve of a moving jump rope; however, the Darrieus is not self-starting, as the blades should be moving faster than the wind to generate power. The giromill can have articulated blades which change angle so it can be self-starting. Another advantage of VAWTs is that the speed increaser and generator can be at ground level. A disadvantage is that taller towers are a problem for VAWTs, especially for wind farm size units. Today there are no commercial, large-scale VAWTs for wind farms, although there are a number of development projects and new companies for small VAWTs. Some companies claim they can scale to MW size for wind farms.
The total system consists of the wind turbine and the load, which is also called a wind energy conversion system (WECS). A typical large wind turbine consists of the rotor (blades and hub), speed increaser (gear box), conversion system, controls and the tower (Figure 1.8). The most common configuration for large wind turbines is three blades, full span pitch control (motors in hub), upwind with yaw motor, speed increaser (gear box), and doubly fed induction generator (allows wider range of rpm for better aerodynamic efficiency). The nacelle is the covering or enclosure of the speed increaser and generator.
The output of the wind turbine, rotational kinetic energy, can be converted to mechanical, electrical, or thermal energy. Generally it is electrical energy. The generators can be synchronous or induction connected directly to the grid, or a variable frequency alternator (permanent magnet alternator) or direct current generator connected indirectly to the grid through an inverter. Most small wind turbines are direct drive and no speed increaser and operate at variable rpm. Wind turbines without a gearbox are direct drive units. Enercon has built large wind turbines with huge generators and no speed increaser, which have higher aerodynamic efficiency due to variable rpm operation of the rotor.
However, there are some energy losses in the conversion of variable frequency to the constant frequency (50 or 60 Hz) needed for the utility grid.